188BET金宝搏下载雅马哈电机增加了LBAR和ABAR杆类型到机器人系列-滑块型阵容获得更苗条的LBAS12和ABAS12型号-
2021年12月2日
岩田,2021年12月2日-雅马哈汽车有限公司(188BET金宝搏下载东京:7272)
今天宣布,其机器人运营部门已在roity工业机器人系列的基本型号阵容中增加了新的杆型型号*,并将在现有的滑块型阵容中增加更瘦的高度降低的型号。这两部电影都将从2021年12月2日开始陆续上映。这些新增的机器人系列将扩大到29个型号,为客户提供更多的产品选择。188 support-cn
机器人系列包括无电机单轴执行器,使客户能够使用他们习惯的电机和驱动器,以及与EP-01机器人定位器捆绑的单轴机器人。该系列由高刚性、结构紧凑、成本低的“基本型”和高精度、高耐久性、无尘规格的“进阶型”组成,让客户可以选择最适合自己需求的型号。
基本型号系列新增了LBAR无电机单轴杆式驱动器和ABAR单轴杆式机器人。其主要特点包括1)内置线性导轨设计,确保刚性,即使在施加径向载荷时,直线性能也不受影响,具有±0°杆非旋转精度的高操作精度,2)结构有助于设备小型化,尺寸比传统型号紧凑约65%,3)支持长达800毫米的长行程。
滑块型产品阵容中增加了更轻薄的LBAS12无电机单轴驱动器和ABAS12单轴机器人。通过重新设计和降低高度,获得了更大的稳定性。当用于笛卡尔式机器人的x轴时,这些是理想的,也有助于整体缩小尺寸。
“roboity”是由“robot”(机器人)和“infinity”(无限)两个词组合而成的新词,这个名字是为了表达该系列丰富的变化。

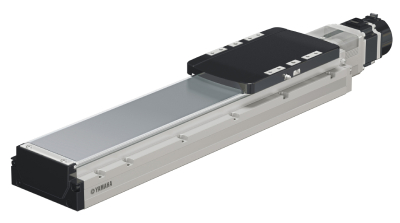
LBAR无电机单轴杆式执行机构(左)和ABAS12超薄单轴滑块式机器人(右)
| 的名字 | 上市日期 | 目标销售 | ||
|---|---|---|---|---|
| Robonity系列: 基本模型 |
杆式 | LBAR无电机单轴驱动器 | 2021年12月2日 | 600个单位 (总级数/ |
| 巴尔单 轴机器人 |
2022年1月20日 | |||
| 滑块式(修身) | LBAS12无电机单轴驱动器 | 2021年12月2日 | ||
| ABAS12单 轴机器人 |
2022年1月20日 | |||
Robonity系列LBAR和ABAR杆型机型的主要特点
高刚性,结构紧凑,行程长
- •
- 高刚性规格,内置直线导轨:由于具有内置线性导轨的一体式结构,即使在施加径向载荷时,直线性能也不会受损。此外,在旋转方向上的抖动被抑制,连接到杆尖的工具实现±0°的非旋转精度。它还可以消除对外部导流器的需求,从而节省安装导流器所需的时间、精力和成本。
- •
- 与传统型号相比,紧凑度提高约65%:与传统型号(TRANSERVO系列SRD05)相比,相同尺寸的LBAR05在宽度上窄了65%左右。这有助于缩小工厂设备的规模。
- •
- 支持长笔画:最大行程800毫米。与传统型号(TRANSERVO系列SRD05)相比,相同尺寸的LBAR05在600 mm时的行程能力约为其两倍。
机器人系列的LBAS12和ABAS12超薄滑块型号的主要特点
超薄的结构使重心更低,使其成为笛卡尔机器人x轴的理想选择
通过全面审查设计,外部宽度减少到120毫米,高度降低到76毫米,从而有助于设施设备的小型化。此外,由于更薄的结构,重心更低,使得该单元非常适合用作笛卡尔机器人的x轴。它也可以在广泛的情况下使用,因为它与具有相同边框宽度的200W和400W电机兼容。
机器人系列的其他特点
模拟器使它更容易选择最佳的规格
您可以通过在网站上的模拟器中输入基本参数来检查预计的循环时间和滚珠丝杠寿命。
*对于杆类,仅可检查循环时间。
Robinity系列基本规格
基本型号(杆式):LBAR无电机单轴驱动器
| 模型 | LBAR04 | LBAR05 | LBAR08 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 兼容电机(W) | 50 | One hundred. | 200 | ||||||
| 重复性(毫米)*1 | ±0.01 | ±0.01 | ±0.01 | ||||||
| 减速机制 | 滚珠丝杠Φ10 (C7级) | 滚珠丝杠Φ12 (C7级) | 滚珠丝杠Φ16 (C7级) | ||||||
| 中风(毫米) | 50 - 500(50毫米节距) | 50 - 600(50毫米节距) | 50 - 800(50毫米节距) | ||||||
| 最大速度(mm/sec)*2*3 | 720 | 360 | 1200年 | 600 | 300 | 1200年 | 600 | 300 | |
| 滚珠丝杠导丝(mm) | 12 | 6 | 20. | 10 | 5 | 20. | 10 | 5 | |
| 最大载荷(kg)* 3 | 水平 | 15 | 25 | 15 | 25 | 50 | 30. | 60 | 80 |
| 垂直 | 3. | 5 | 4 | 8 | 16 | 8 | 20. | 30. | |
| 最大压紧力(N)*3 | 83 | 167 | One hundred. | 200 | 400 | 201 | 402 | 804 | |
| 杆非旋转精度 | ±0° | ||||||||
| 主机最大截面形状(mm) | W44 × H46 | W54 x H54.7 | W82 x H73.5 | ||||||
| 总长度(mm) | 直 | 圣+ 263 | 圣+ 269.5 | 圣+ 326 | |||||
| 折叠 | 圣+ 245 | 圣+ 249 | 圣+ 312.5 | ||||||
| 工作环境温度(℃)、湿度(% RH) | 0-40°C, 35-85% RH(不凝结) | ||||||||
| 兼容伺服电机 | 安川电气,Keyence, 三菱电机,欧姆龙, 松下,三洋电机, 玉川精机,德尔塔电子,发那科公司,西门子,施耐德,倍福,艾伦-布拉德利 |
安川电气,Keyence, 三菱电机,欧姆龙, 松下、三洋电机、玉川精机、台达电子、发那科公司、王伺服、西门子、施耐德、倍福、艾伦-布拉德利 |
安川电气,Keyence, 三菱电机,欧姆龙, 松下、三洋电机、玉川精机、台达电子、西门子、施耐德、王伺服 |
||||||
| 兼容步进电机 | 东方汽车,NEMA标准 | ||||||||
- *
- 1:定位重复性在一个方向
- *
- 2:移动距离较短或在某些操作条件下,可能达不到最大速度。当有效行程超过300mm (LBAR05为350mm, LBAR08为400mm)时,滚珠丝杠可能会发生谐振,这取决于工作区域(临界转速)。在这种情况下,使用表中显示的最大速度作为指导,调整以降低速度。
- *
- 3:根据所安装的电机,可能不符合规定的规格。
基本型号(杆式):ABAR单轴机器人
| 模型 | ABAR04 | ABAR05 | ABAR08 | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 电机输出交流(W) | 50 | One hundred. | 200 | ||||||||||||||||||||||
| 重复性(毫米)*1 | ±0.01 | ±0.01 | ±0.01 | ||||||||||||||||||||||
| 减速机制 | 滚球screwΦ10 (C7级) | 滚球screwΦ12 (C7级) | 滚球screwΦ16 (C7级) | ||||||||||||||||||||||
| 中风(毫米) | 50 - 500(50毫米节距) | 50 - 600(50毫米节距) | 50 - 800(50毫米节距) | ||||||||||||||||||||||
| 最大速度(mm/sec)*2 | 720 | 360 | 1200年 | 600 | 300 | 1200年 | 600 | 300 | |||||||||||||||||
| 滚珠丝杠导丝(mm) | 12 | 6 | 20. | 10 | 5 | 20. | 10 | 5 | |||||||||||||||||
| 最大载荷(kg) | 水平 | 15 | 25 | 15 | 25 | 50 | 30. | 60 | 80 | ||||||||||||||||
| 垂直 | 3. | 5 | 4 | 8 | 16 | 8 | 20. | 30. | |||||||||||||||||
| 最大压紧力(N) | 83 | 167 | One hundred. | 200 | 400 | 201 | 402 | 804 | |||||||||||||||||
| 杆非旋转精度 | ±0° | ||||||||||||||||||||||||
| 主机最大截面形状(mm) | W44×H46 | W54×H54.7 | W82×H73.5 | ||||||||||||||||||||||
| 总长度(mm) | 直 | 圣+ 326.5 | 圣+ 344 | 圣+ 401 | |||||||||||||||||||||
| 折叠 | 圣+ 245 | 圣+ 249 | 圣+ 312.5 | ||||||||||||||||||||||
| 位置检测 | 绝对编码器 无电池绝对编码器 |
||||||||||||||||||||||||
| 决议 | 23位 | ||||||||||||||||||||||||
| 工作环境温度(℃), 湿度(% RH) |
0 ~ 40°C, 35 ~ 85% RH(不凝结) | ||||||||||||||||||||||||
- *
- 1:定位重复性在一个方向
- *
- 2:移动距离较短或在某些操作条件下,可能达不到最大速度。当有效行程超过300毫米(ABAR05为350毫米,ABAR08为400毫米)时,滚珠丝杠可能会发生共振,这取决于操作区域(临界速度)。在这种情况下,使用表中显示的最大速度作为指导,调整以降低速度。
基本型号(细滑块型):LBAS12无电机单轴驱动器
| 模型 | LBAS12 | ||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 兼容电机(W) | 200 w | 400 w | |||||||||||||||||||||||
| 重复性(毫米)*1 | ±0.01 | ||||||||||||||||||||||||
| 减速机制 | 滚球screwΦ16 (C7级) | ||||||||||||||||||||||||
| 中风(毫米) | 50 - 1250(50毫米节距) | ||||||||||||||||||||||||
| 最大速度(mm/sec)*2 | 1800年 | 1200年 | 600 | 300 | 1800年 | 1200年 | 600 | 300 | |||||||||||||||||
| 滚珠丝杠导丝(mm) | 32 | 20. | 10 | 5 | 32 | 20. | 10 | 5 | |||||||||||||||||
| 最大载荷(kg)* 3 | 水平 | 20. | 40 | 80 | One hundred. | 35 | 50 | 95 | 115 | ||||||||||||||||
| 垂直 | 3. | 8 | 20. | 30. | 8 | 15 | 25 | 40 | |||||||||||||||||
| 额定推力(N)*3 | 105 | 170 | 341 | 683 | 218 | 339 | 678 | 1360 | |||||||||||||||||
| 主机最大截面形状(mm) | W120 × H76 | ||||||||||||||||||||||||
| 总长度(mm) | 直 | 圣+ 294 | |||||||||||||||||||||||
| 折叠 | 圣+ 270.5 | ||||||||||||||||||||||||
| 工作环境温度(℃), 湿度(% RH) |
0 ~ 40°C, 35 ~ 85% RH(不凝结) | ||||||||||||||||||||||||
| 兼容伺服电机 | 安川电机、Keyence、三菱电机、欧姆龙、松下、三洋电机、玉川精机、台达电子、西门子、施耐德、王伺服 | ||||||||||||||||||||||||
- *
- 1:定位重复性在一个方向
- *
- 2:移动距离较短或在某些操作条件下,可能达不到最大速度。当有效行程超过600mm时,滚珠丝杠可能会发生谐振,这取决于操作区域(临界转速)。在这种情况下,使用表中显示的最大速度作为指导,调整以降低速度。
- *
- 3:最大负载/额定推力为安装电机输出额定扭矩时的值。
基本型号(细滑块型):ABAS12单轴机器人
| 模型 | ABAS12 | ABAS12H | |||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 电机输出交流(W) | 200 | 400 | |||||||||||||||||||||||
| 重复性(毫米)*1 | ±0.01 | ||||||||||||||||||||||||
| 减速机制 | 滚球screwΦ16 (C7级) | ||||||||||||||||||||||||
| 中风(毫米) | 50 - 1250(50毫米节距) | ||||||||||||||||||||||||
| 最大速度(mm/sec)*2 | 1800年 | 1200年 | 600 | 300 | 1800年 | 1200年 | 600 | 300 | |||||||||||||||||
| 滚珠丝杠导丝(mm) | 32 | 20. | 10 | 5 | 32 | 20. | 10 | 5 | |||||||||||||||||
| 最大载荷(kg)* 3 | 水平 | 20. | 40 | 80 | One hundred. | 35 | 50 | 95 | 115 | ||||||||||||||||
| 垂直 | 3. | 8 | 20. | 30. | 8 | 15 | 25 | 40 | |||||||||||||||||
| 额定推力(N) | 105 | 170 | 341 | 683 | 218 | 339 | 678 | 1360 | |||||||||||||||||
| 主机最大截面形状(mm) | W120 × H76 | ||||||||||||||||||||||||
| 总长度(mm) | 直 | 圣+ 369 | 圣+ 385 | ||||||||||||||||||||||
| 折叠 | 圣+ 270.5 | 圣+ 270.5 | |||||||||||||||||||||||
| 位置检测 | 绝对编码器 无电池绝对编码器 |
||||||||||||||||||||||||
| 决议 | 23位 | ||||||||||||||||||||||||
| 工作环境温度湿度(℃) 湿度(% RH) |
0 ~ 40°C, 35 ~ 85% RH(不凝结) | ||||||||||||||||||||||||
- *
- 1:定位重复性在一个方向
- *
- 2:移动距离较短或在某些操作条件下,可能达不到最大速度。当有效行程超过600mm时,滚珠丝杠可能会发生谐振,这取决于操作区域(临界转速)。在这种情况下,使用表中显示的最大速度作为指导,调整以降低速度。